

Tallinna linn on välja töötanud liikuvuskava aastani 2035. Suures pildis on kava positiivne, eriti selles olevad selged strateegilised mõõdikud ja sihtväärtused, mis annavad signaali, mida soovitakse saavutada ning peaks võimaldama ka tegevuste mõju ehk tõhusust mõõta. Üles on leitud ka Rootslaste nelja sammu printsiip.
Kava kandvaks osaks on üheksa tänavatüüpi, mida pean vajalikuks kommenteerida. Tänavatüüpide idee on üle võetud ja mugandatud Londoni linna vastavast kavast, mis võiks tähendada teatavat kvaliteedimärki. Kahjuks on selles muganduses mitmeid probleeme.
London ja Tallinn erinevad oluliselt. Mitmemiljonilise elanike arvuga linnas on ulatuslik metroovõrk, raudteede võrk ning neli lennujaama ja mitu ringmagistraali. Seetõttu pole Londoni “standard” kõige parem üle võtmiseks ja mugandamiseks.

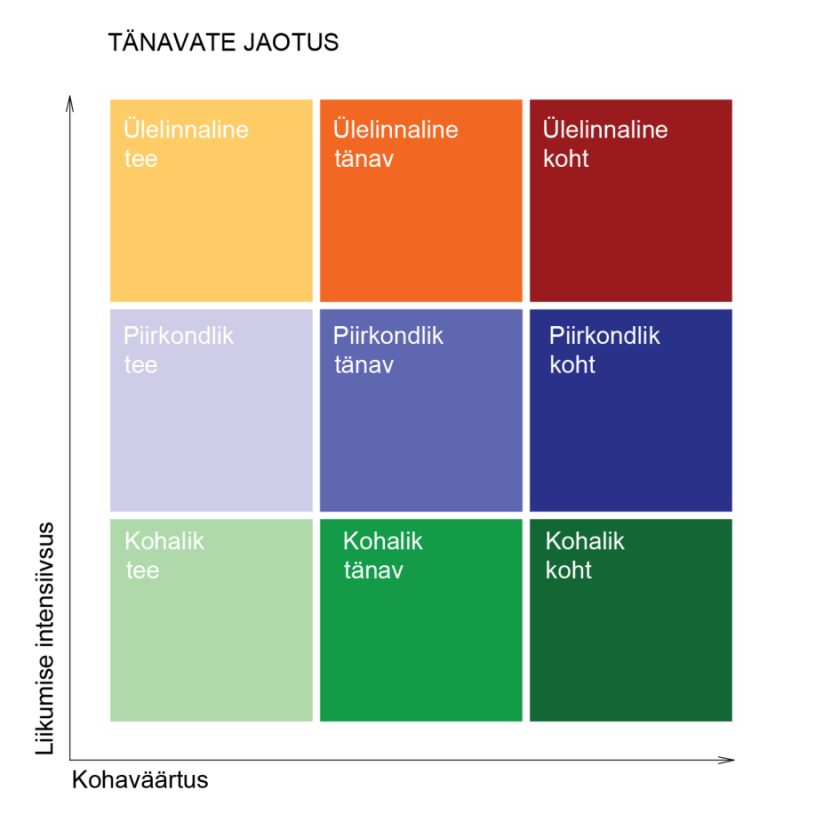
Tänavate tüpoloogia on pandud sõltuma liikumusest (liiklussagedusest) ja kohaväärtusest.
Nii Londoni, kui Tallinna tänavate jaotuse probleem on see, et see on ülesehitatud valedel alustel ja on vastuolus kestliku ohutu tee printsiipidega. See tuleb välja näiteks tänavate tüpoloogiaga seotud kiiruste diagrammil, aga ka enam-vähem kõigil teistel esitatud diagrammidel.
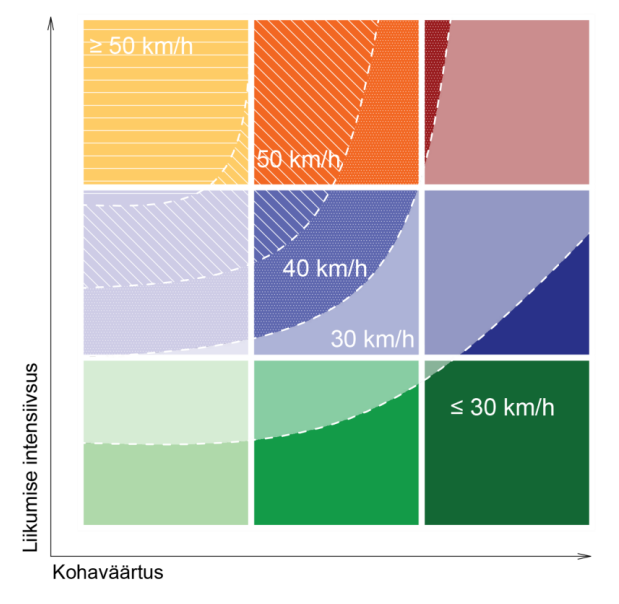
Diagrammilt selgub, et on olemas nn hallid alad, kus võiks rakendada erinevaid kiirusi, kuid millisest printsiibist lähtuvalt? Kuivõrd tänava tüüp on seotud intensiivsusega, siis tähendab see seda, et mida rohkem liikumist, seda suurem võiks olla kiirus. Kuid mille intensiivsusest me räägime? Kas sõidukite või inimeste? Kumb on olulisem?
Kohaväärtustki võib mõista mitmeti sõltuvalt vaatepunktist. Kohtadel on erinevate inimeste jaoks erinevad ja sageli vastuolulised väärtused. Oma kodutänavale keegi läbivat liiklust ei soovi, kuid teiste kodutänavast ollakse valmis küll läbi sõitma.
Ohutute tänavate tüpoloogia
Hollandlased on välja arendanud universaalsed ohutusprintsiibid, mis ei ole sõltuvuses riigikorrast ega päikesetõusust. Kestliku ohutu tee esmane printsiip on liikuvuse funktsionaalne hierarhia. Funktsioon tuleneb liikuvuse erinevatest eesmärkidest ja suhtest konteksti. Kas tegemist on mööduva liikujaga või on tal siia asja ka? Erinevate funktsioonide segamine tähendab automaatselt konflikti ning sõltumata kavatsustest on tulemuseks nn teenav (stroad). Seetõttu on Tallinna liikuvuskavasse ka programmeeritud mitmed probleemid, näiteks ülelinnaline tänav, mis peaks “võimaldama lihtsat ligipääsu teenustele ja kauplustele” on tüüpilise kaubanduskeskuse arendaja märg unenägu – mahasõit kaubanduskeskusesse otse põhitänavalt! Kindel viis kiirendada autostumist ja oikuipalju “häid” näiteid meil linnas on.
Kui funktsionaalne hierarhia ristata linnalise kontekstiga, siis võiksime saada tulemuseks ohutud tänavate tüübid.
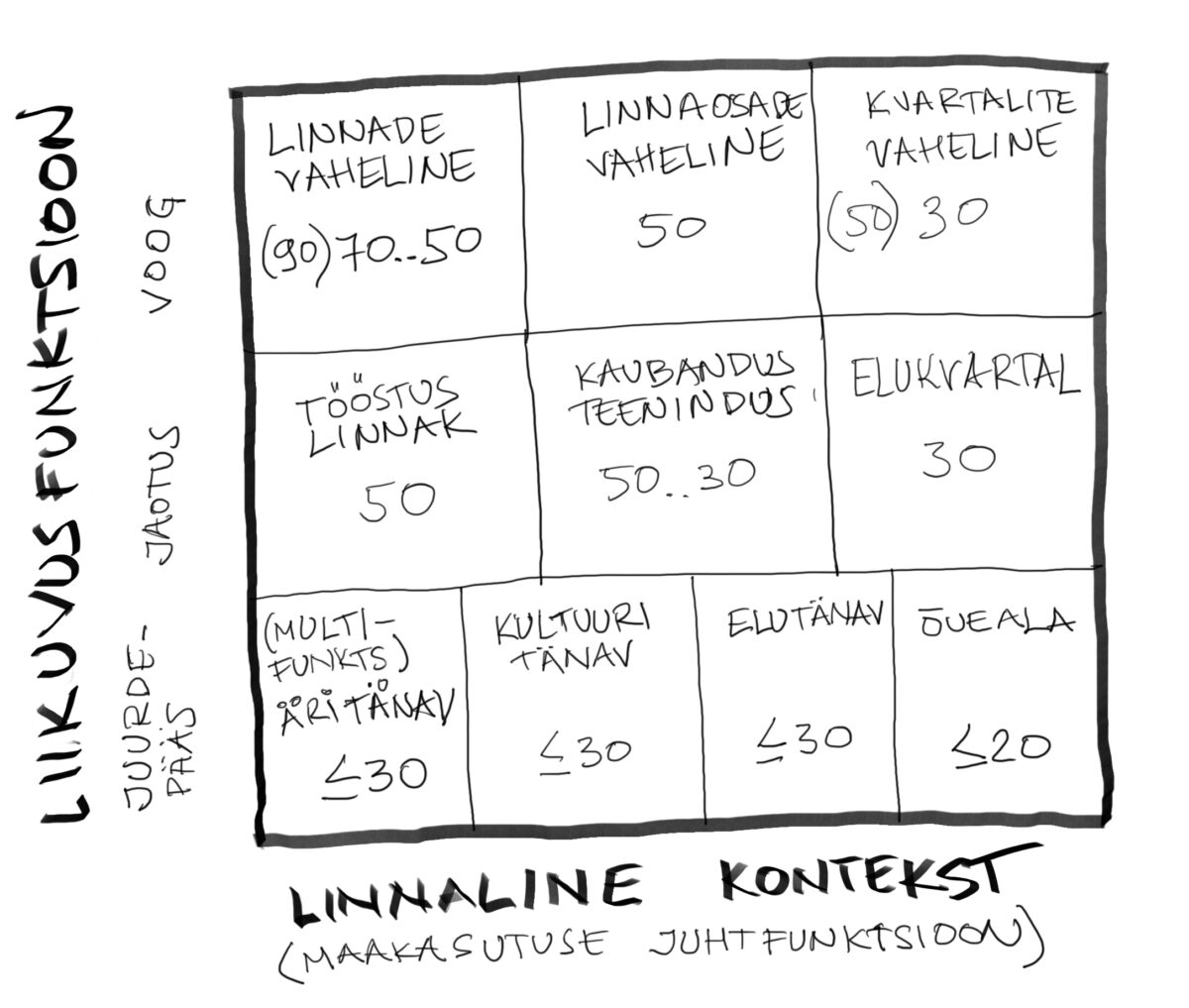
Kordame veelkord üle ohutuse printsiibi – liikuvuse funktsioone ei segata. Juurdepääsu tänavale ei lubata voogu ja piirkondi ühendavatele tänavatele ei lubata juurdepääse. Juurdepääsutänavad saavad alguse jaotustänavatelt. Tänava tüüp ei tähenda veel, et kõik selletüübilised tänavad oleksid ühesugused. Lisaks linnaehituslikule kontekstile tuleb arvestada erinevate liiklejate intensiivsusega (oodatava, mitte prognoositava), mis defineerib ruumivajaduse (mitte kiiruse!!!) igale liiklusmoele. Kas tänaval on rööbastransport? Kas tänaval on välistatud teatud tüüpi liiklejad/liikujad? Kas on tegemist raskete või ohtlike veoste marsruutidega?
Kiiruse defineerimise kõige olulisemaks parameetriks on konfliktsus ning kuidas konflikte välistatakse või leevendatakse. Selleks, et linnade vahelist voogu teenindaval tänaval lubada ohutult kiirust 70km/h, tuleks välistada samatasandilised konfliktid aktiiv- ja mikroliikuvusega. Teisalt juurdepääsutänavatel on konfliktsus lausa normaalsus ja see on osa kiiruste ohjeldamise strateegiast.
Euroopas on mitmed linnad kehtestanud üldise kiiruspiirangu 30km/h ja käib kampaania sellise piirangu sätestamiseks üle-Euroopaliselt. See on mõistlik, sest 90% kogu tänavavõrgust on juurdepääsud. Selle asemel, et kõikidele tänavatele paigaldada kiiruspiirangu märke, oleks palju lihtsam üksikutel tänavatel markeerida suuremat lubatavat kiirust ainult siis kui funktsioon seda eeldab ja keskkond seda võimaldab. Teisalt on ka 30km/h suur kiirus õueala jaoks, kus mängivad lapsed. Kiirus jällegi on väga oluline ühistranspordi jaoks, nagu ka kavast selgub. See aga tähendab, et ühistranspordi koridorides on vaja suuremaid kiirusi, kui saab lubada juurdepääsudele.
Nüüd tekib ilmselt küsimus, et kuidas seda voogu juurdepääsudest eraldada (või vastupidi) kui täna on üks ruumipuuduses vaevlev segafunktsiooniga tänav? Näiteid leiab jällegi meile sageli eeskujuks toodavatest linnadest nagu Kopenhaagen, Stockholm, Oslo, kus maapealse “kohaväärtuse” ehk juurdepääsutänava loomiseks on voog viidud maa alla. Ajalooliselt väljakujunenud linnakeskkonnas on see sageli ainus viis, sest alternatiiv oleks teha estakaade, mis linna keskkonda kuidagi meeldivamaks ei tee (mägistes piirkondades on samas ka positiivseid näiteid). Teine võimalus, mida ka Skandinaavias järjest enam kasutatakse, on tänavate (ja ka raudteede) peale ehitamine ehk siis maapealsete tunnelite ehitamine.
Heas linnas ei ole liikumisruumiks ainult tänavad, vaid ka pargid ja metsad, sini-rohelised koridorid. Nendel on oluline osa just aktiiv- ja mikroliikuvuse edendamisel. Linnadest leiab aga ka erinevaid näiteid liikumiskoridoridest hoonete katustel või keldrites ja tunnelites. Rotterdamis on hiljuti rajatud eksperimentaalne jalgtee üle katuste. Analooge leiab ka Kopenhaagenist, kus jalgtee (juurdepääs) on rajatud kortermaja katusele.
Liikuvuskava ohutuks tegemisel tuleb niisiis lähtuda ohutusprintsiipidest ja juurde võtta mikroliikuvuse planeerimise printsiibid. Veelgi parem oleks need printsiibid viia sisse linna üldplaneeringusse ja jätta kava vaid strateegiliste eesmärkide ja mõõdikute seadmiseks.